Professeur expérimentateur
- Alban GOULLEY
- Collège Anatole France
- Les Clayes sous Bois (78)
Niveau - Thèmes
- Collège
- Cycle 3 - 6ème
Introduction
Le but de la séquence proposée est de faire travailler les élèves sur la notion de vitesse, de distance parcourue grâce à la programmation d’un drone.
Compétences du socle commun et nouveau référentiel
- Pratiquer des langages (D1) :
1. S’exprimer à l’oral, lire et comprendre l’écrit, écrire.
3. Se repérer et se déplacer : écrire un programme permettant le déplacement d’un robot
- Mobilisation des outils numériques (D2) :
Coopérer et réaliser des projets
Mobiliser des outils numériques pour communiquer
- Concevoir, créer, réaliser (D4) :
Mener une démarche scientifique ou technologique , résoudre des problèmes simples
CRCN - Compétences Numériques
- C 2.3. Collaborer : collaborer dans une groupe pour réaliser un projet
- C3.2 Développer des documents visuels et sonores : développer des documents à contenus multimédias
- C 3.4 Programmer : écrire des programmes et des algorithmes
Notions et contenus du programme
- Notions et contenus :
Mesurer la vitesse d’un objet. Programmer un objet connecté. Aborder la notion de trajectoire. - Compétences exigibles :
Identifier un mouvement rectiligne, accéléré ou ralenti dans un mouvement rectiligne. Elaborer et mettre en oeuvre un protocole pour appréhender la notion de mouvement et de mesure de la vitesse d’un objet. - Capacité numérique :
Notion d’algorithmes et programmation d’objet.
Objectif(s) pédagogique(s)
Répondre à une problématique environnementale actuelle et réfléchir à la pertinence de la solution apportée par un article. Exercer un regard critique sur des propositions scientifiques.
S’engager dans un projet et mobiliser des compétences mathématiques, de programmation et de physiques.
Objectifs disciplinaires et/ou transversaux
Schématiser une situation donnée pour élaborer un programme répondant à une problématique
Mesurer la vitesse et ré-investir la mesure pour calculer un durées de parcours.
Description succincte de l’activité
Cette séquence fait suite à l’étude de la reproduction des plantes à fleur. Elle est introduite par un article portant sur la pollinisation par des drones. L’objectif de la séquence est de conclure sur les avantages et les inconvénients d’une telle solution.
Au cours de la séquence, les élèves auront à mesurer une vitesse et calculer des durées de parcours afin de faire déplacer les drones d’un point A à un point B.
Découpage temporel de la séquence
6 séances (environ 2 semaines)
Pré-requis
Cette séquence fait suite à l’étude de la reproduction des plantes à fleur. Après avoir vu les conditions de germination et de croissance, les élèves découvrent les conditions pour obtenir un fruit à partir d’une fleur. Ils apprennent donc que pour obtenir un fruit, il faut que le pollen d’une fleur entre en contact avec un pistil, il s’agit de la pollinisation. On conclut cette séquence par un rapide tour des acteurs de pollinisation et une sensibilisation à la « disparition des abeilles ».
Outils utilisés / Matériel
- iPad élève (1 par groupe)
- 1 ou 2 drone Parrot Cargo (programmable avec Tynker)
Gestion du groupe - Durée estimée
En classe entière
Présentiel : 6h
Distanciel : 1h
Déroulement de la séquence
| À faire en classe - séance 1 : introduction |
|---|
Lire l’article sur le « drone pollinisateur »
Construire un paragraphe répondant aux différentes questions
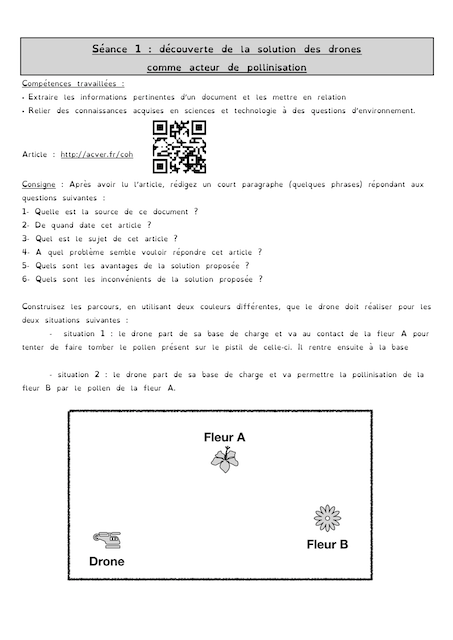
Représenter les deux trajets envisagés
| À faire à la maison, avant la séance 2 |
|---|
Finir les trajets
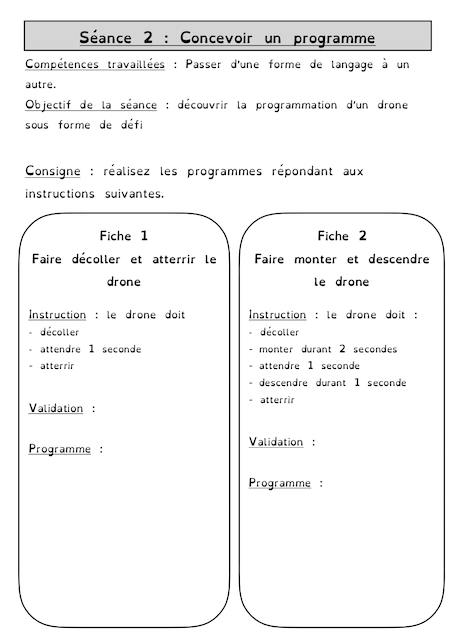
| À faire en classe - séance 2 : Défi programmation |
|---|

| À faire à la maison, avant la séance 3 |
|---|
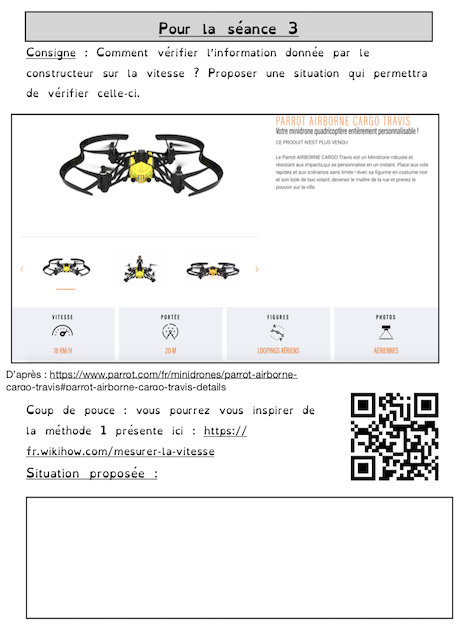
Proposer un dispositif pour mesurer la vitesse
| À faire en classe - séance 3 : synthèse des dispositifs proposés |
|---|
Mise en oeuvre des différents dispositifs
Chronophotographie du vol
Faire légender le mouvement accéléré, uniforme et ralenti
Détermination de la vitesse moyenne à 50%, 25%

| À faire à la maison, avant la séance 4 |
|---|
Professeur : imprimer les chronophotographies
| À faire en classe - séance 4 : préparation des programmes |
|---|
Préparation des programmes pour les deux situations pour chaque groupe
Construction de la situation donnée
Détermination des temps de parcours
Proposition des programmes
Rotation des situations au groupe suivant
Proposition de programmes par le groupe suivant
Mise en commun des deux propositions par un groupe tiers et mise au propre du programme proposé
Chaque groupe récupère sa situation initiale et le reporte sous Tynker
Une photo de l’écran est déposé sur l’ENT pour vérification du professeur
| À faire en classe - séance 5 : expérimentation des programmes |
|---|
Détermination d’un barème d’évaluation des restitutions des vidéos.
Expérimentation des programmes par passages successifs des groupes
Les autres groupes réalisent une vidéo sur les avantages et les inconvénients des « drones pollinisateurs », ce qu’ils ont appris et retenu.
| À faire en classe - séance 6 : visualisation et évaluation |
|---|
Visualisation de l’ensemble des vidéos
Reprise des éléments donnés et développement par les élèves
Evaluation entre pairs
Retour d’expérience
| Les plus-values pédagogiques (enseignants / élèves) |
|---|
– Le questionnement initial sur l’utilisation des drones à la place des abeilles a permis une bonne appropriation de la problématique. Les questions environnementales soulèvent beaucoup de questions chez les élèves.
– La recherche d’une situation de détermination de vitesse a beaucoup questionné. Les élèves savent globalement ce que représentent la vitesse mais ont des difficultés à imaginer une situation de mesure de cette vitesse.
– La schématisation des situations a permis aux élèves de limiter les difficultés qui auraient pu surgir lors de la programmation des drones (en particulier sur les instructions liées aux angles de rotation).
| Les freins |
|---|
- difficultés liées à la programmation ou à la maîtrise du logiciel Scratch
Les freins liés à la programmation ou à la maitrise de l’application Tynker
Pour la moitié des élèves, premier contact avec une programmation par bloc. Le temps d’appropriation a été assez court.
- difficultés liés à la « représentation dans l’espace »
– Le drone devant se déplacer dans toutes les directions, certains élèves ont rencontré des difficultés à se représenter mentalement ces déplacements.
– Les élèves devaient préparer les programmes en utilisant une représentation sur papier des trajets à suivre. Ils ont réalisé leurs mesures et leurs programmes en se servant de cette représentation. La mesure des angles a été un peu délicate, les élèves ont mesuré les angles internes des triangles considérés et non l’angle de rotation du drone (angle supplémentaire de l’angle interne au triangle). Deux situations ont émergé selon les groupes, certains s’appuyant uniquement sur l’essai-erreur lors de la phase d’essai et d’autres en cherchant le problème et en modifiant le programme en conséquence en amont.
- difficultés liées à la physique-chimie en particulier lié à la vitesse
– la question de l’élaboration d’un protocole afin de la mesurer a questionné les élèves. Ils ont une idée de ce qu’est la vitesse d’un objet mais ne parviennent pas à en faire une mesure autrement que par un instrument (compteur de vitesse, radar,…).
– l’utilisation de la formule de la vitesse a été un point délicat de la séquence. La détermination de la vitesse a été plutôt aisée une fois la solution expérimentale trouvée, mais la détermination du temps nécessaire pour parcourir une distance (compte tenu de la vitesse du drone) s’est révélée bien plus difficile pour de nombreux élèves. Le cycle 4 sera l’occasion de revenir sur ce point.
– la « non proportionnalité » dans la situation donnée a été la difficulté principale. Nous avons déterminé la vitesse moyenne du drone sur un vol de 10 mètres (environ 2 m/s) mais les élèves ont constaté que si l’on faisait voler le drone durant 1 seconde celui-ci ne parcourait qu’environ un mètre (au lieu des 2 prévus). Cela a été l’occasion de discuter de la différence entre vitesse moyenne sur un long trajet (durant les vacances par exemple) et vitesse instantanée (celle donnée par le compteur de la voiture). Les élèves ont proposé de s’affranchir de cette difficulté en faisant plusieurs mesures de distances pour des temps donnés.
| Les leviers |
|---|
– Le levier principal de la programmation est la possibilité de faire beaucoup de tentatives successives si une erreur est faite. Le programme répond aux instructions données, si elles sont fausses, erronées ou incomplètes, soit le programme se lance (et le drone fait le début de son chemin) ou alors il ne se lance pas. Cela contraint l’élève à s’interroger sur le problème rencontré (blocs non emboités, pas d’instruction de départ, valeur d’angle qui ne correspond pas,…) et à chercher par lui même la solution (par essai-erreur ou par une reprise du modèle prévu).
– Une seule des deux classes avait utilisé Scratch en mathématiques. Ils ont très vite retrouvé leurs marques. L’autre classe, n’a pas rencontré de difficultés majeures, la programmation par bloc a été rapidement maitrisée et la logique vite comprise.
– L’utilisation d’un objet connecté a contraint les élèves à réfléchir à un dispositif de mesure de vitesse. Tynker ne permet pas de fixer la vitesse du drone mais seulement de lui donner un pourcentage de sa vitesse maximale. Il fallait donc connaitre sa vitesse maximale.
– Comme déjà évoqué dans les difficultés, l’utilisation du drone a permis d’aborder la différence entre la vitesse moyenne d’un objet en mouvement et sa vitesse instantanée. Cette difficulté a contraint les élèves à réfléchir sur les raisons de la différence entre la durée de parcours calculée (par la vitesse moyenne) et la distance réellement parcourue. Il a fallu faire émerger le besoin d’avoir un tableau de correspondance durée / distance parcourue.
– Les séances de mise en place des programmes a permis de travailler des compétences mathématiques (construction de triangle à l’aide des distances et mesure d’angle). Ce type de séquence s’inscrit pleinement dans la philosophie de l’enseignement scientifique prévu au cycle 3.
– L’organisation de ce type de séquence sous forme de projet qui répond à une problématique est vecteur de motivation pour les élèves. Ils ont montré beaucoup de volonté et du curiosité, quelle que soit les activités réalisées. Il m’a semblé important sur l’ensemble des séances de rappeler la problématique à laquelle nous souhaitions répondre. Il me semblait important aussi d’aborder une problématique environnementale actuelle et d’inciter les élèves à se questionner sur les solutions proposées par l’Homme pour y remédier.
– Enfin, les élèves ont pu travailler des compétences numériques (au delà de la programmation) par la réalisation de vidéos, de montage. Ils ont aussi travaillé leur capacité à s’exprimer à l’oral et à scénariser une courte capsule vidéo.
| Les pistes pour aller plus loin ou généraliser la démarche |
|---|
L’utilisation du drone n’est pas une obligation, nous aurions pu utiliser d’autres objets connectés comme les robots mBot.
| L’ensemble des documents de la séquence |
|---|
